Ardupilot—A Powerful Open-Sourced Autopilot Software
Start of the semester, I asked Phillip to print out some PCBs for my SuperMileageVehicle Club Project, so here is an introduction of what my project is and a summary of what I did this semester.
The purpose of this project is to have a real time updating GPS system in the Vehicle in order to obtain data like location coordinates, velocity, acceleration, angle, etc. We had a old system that used two antennas at the front and back of the vehicle for locating, however the signal is severely interfered by the tower on one side of the Indianapolis Motor Speedway (where the competition is), so we came up with the alternative solution of using Ardupilot.

looks like this right now because we haven’t successfully connect it yet:(
Ardupilot uses the MAVlink protocol to exchange data, allowing my computer to retrieve data from sensors connected to the raspberry pi. We install Tailscale on both my computer and the raspberry pi to establish a cellular data link between them.

We also use a board for Ardupilot called Open-Board Architecture for Linux (OBAL). It has designed for current/voltage sensor, PWM output sensing, LED&Buzzer Driver, etc., but for our purposes we are only using the IMU and barometer slots.
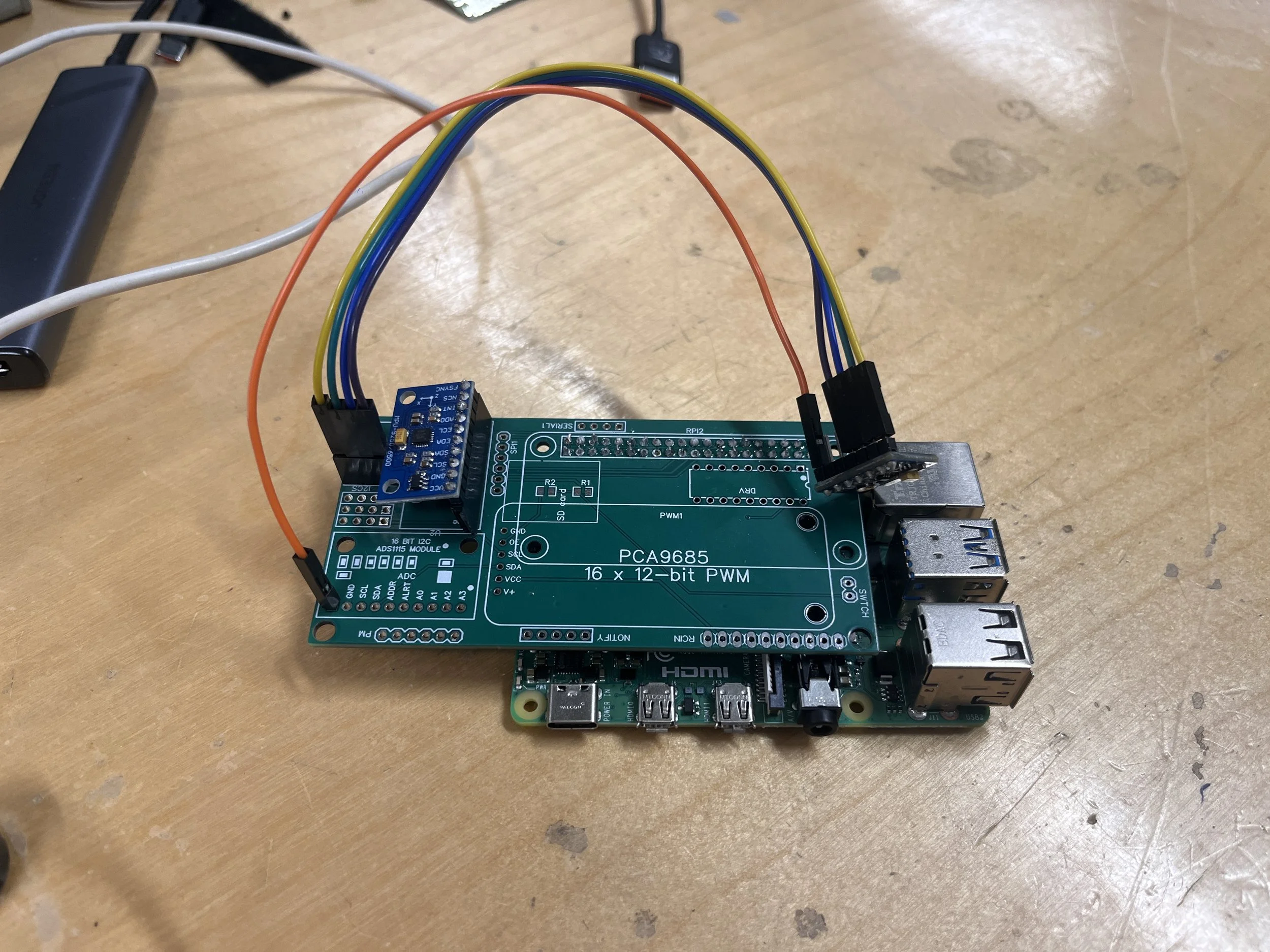
my baby
Yesterday we successfully compiled Ardupilot for this specific barometer MS5611 because the default one that is used on the OBAL is obsolete. We will be working over winter break to get this fully working so we can hopefully start testing in the car next semester.
Shout out to Ian Butler for basically leading me step by step through this